In 2022, I had an exhibition at Café Kaktus in Friedberg (Hessen), where visitors could see the robots 'at work.' There were drinks and small snacks available. Musically, the exhibition was accompanied by my co worker from Galerie Hoffmann, Mathias Henne, who provided abstract electric guitar sounds, effects devices, and a loop station. More information can be found in the article from Wetterauer Zeitung on Monday, February 14, 2022. Many thanks to Su Kyoung Yu and the Café Kaktus team for their support.
Some impressions from the exhibition opening at Café Kaktus in Friedberg (Hessen) on Saturday, February 12, 2022.
About the series 'Robodraw'
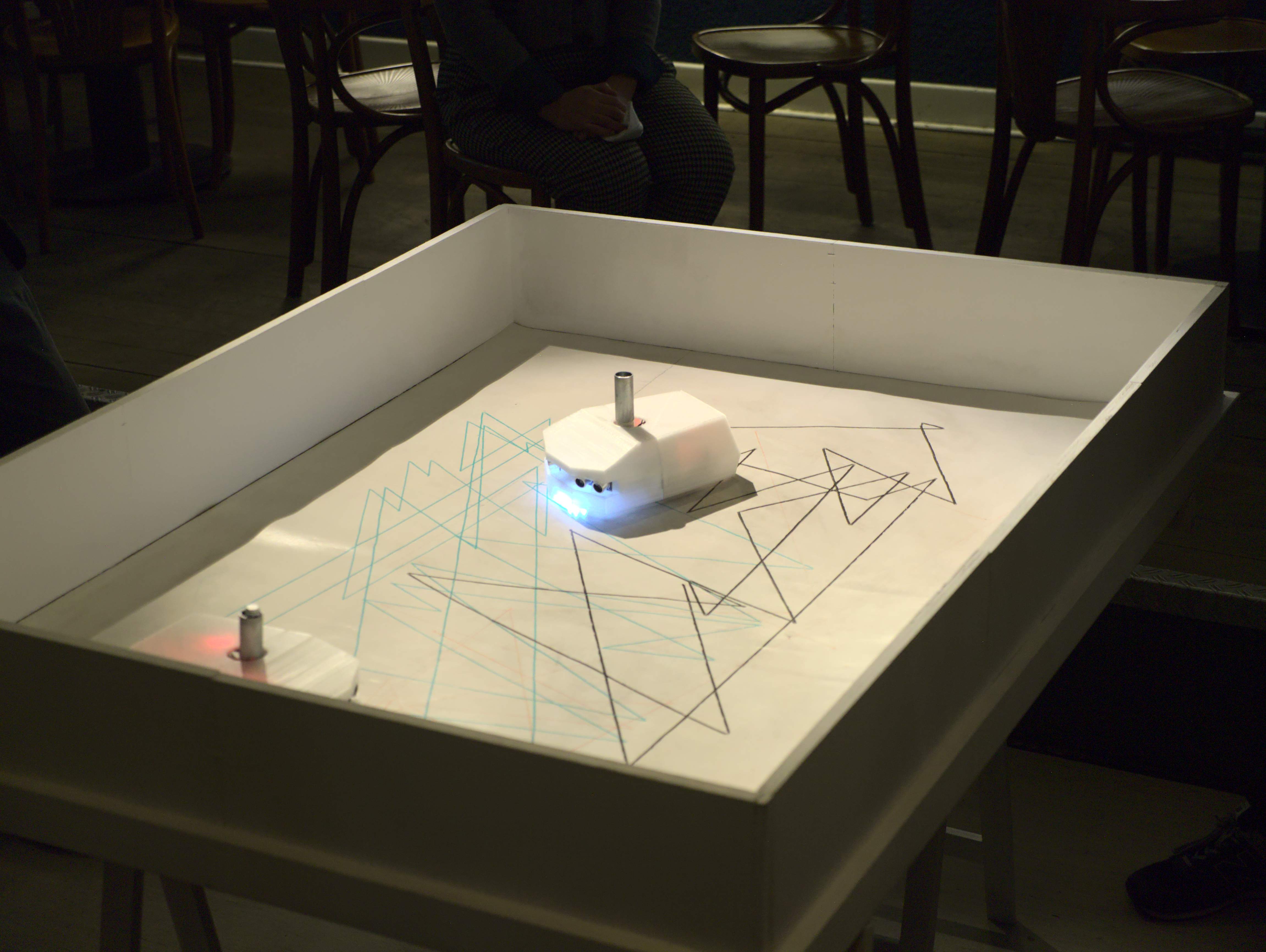
The robots are battery-operated, autonomously moving vehicles, each measuring 22x15x15 cm. They are equipped with ultrasonic sensors that allow them to perceive distances.
The robots operate based on simple predefined rules: 'Move forward until an obstacle appears, then try evade it at a defined angle in the direction where the obstacle can be bypassed most quickly.' The robots move on a 80 x 120 cm sheet of paper (approximately equivalent to DIN A0). The paper is placed on a table with 20 cm-high walls along its edges, allowing the robots to recognize the boundaries of their operating area.
The robots can pick up a pen, which they can raise and lower using a servo motor. This enables them to move across the paper and draw. Since the robots' initial angle when placed on the paper is never exactly the same, and because they avoid each other, each time a new and unpredictable result is generated. Although the programmed rules of the robots are relatively simple, they continuously create new compositions influenced by chance.
On the one hand, the works consists of the graphics created by the robots on the paper, on the other hand, it consists of the installation itself, which includes the robots moving freely within their 'living and working space' while generating the artwork.
The mechanical parts of the robots are designed using CAD software and printed with a 3D printer. The hardware is based on an Arduino microcontroller, a servo motor, two stepper motors, ultrasonic sensors, a felt or acrylic pen, and rechargeable batteries. The software (firmware) is written in the programming language C.
Feel free to send me a message at hello[ät]hannes-siller.com if you wan't to know more about my art.