Robodraw
Concept & Installation
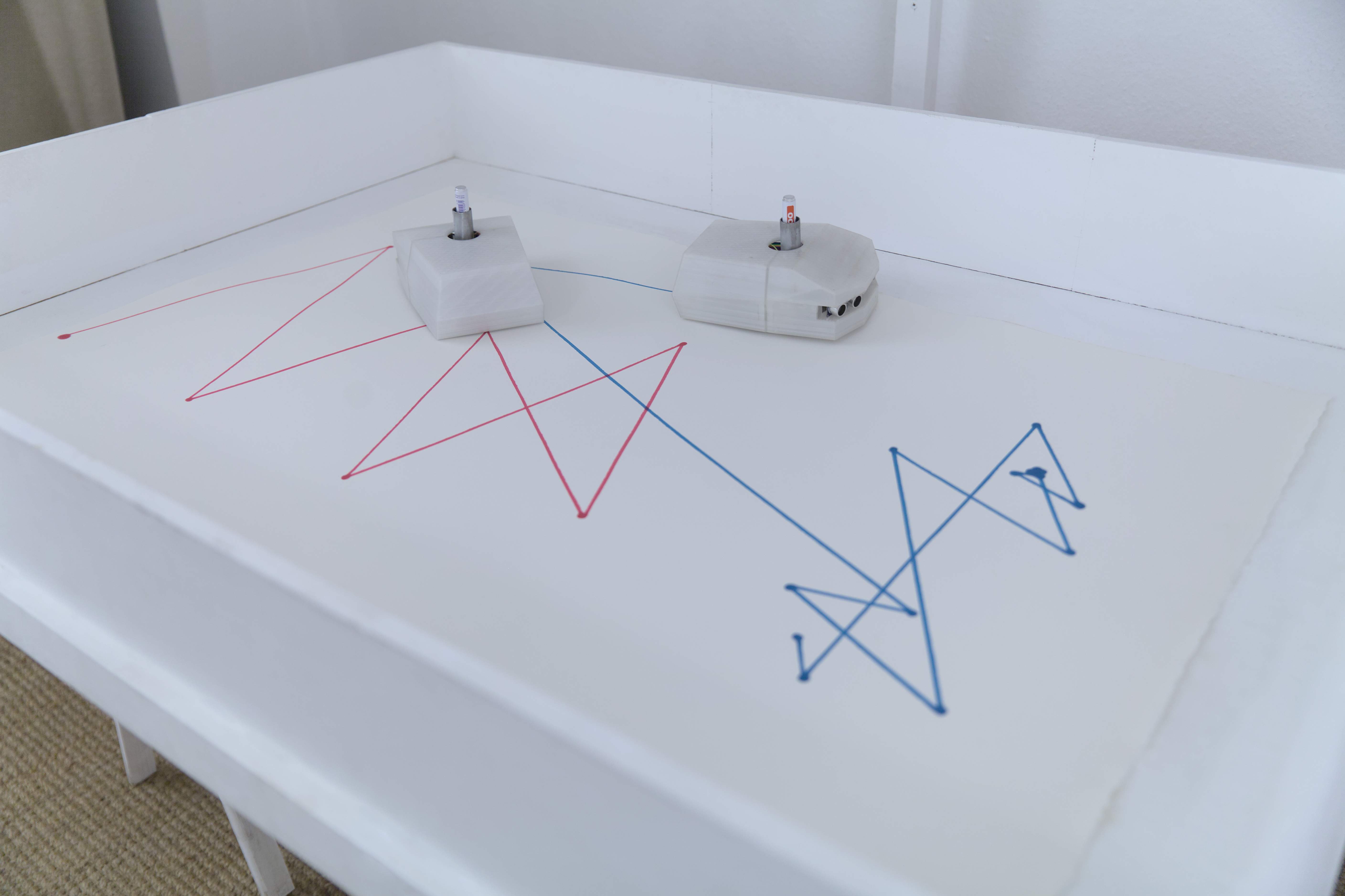
This work exists in two parts: the generative graphics created on paper and the installation itself—a "living and working space" where robots move freely to generate artwork in real-time.Chance & Composition
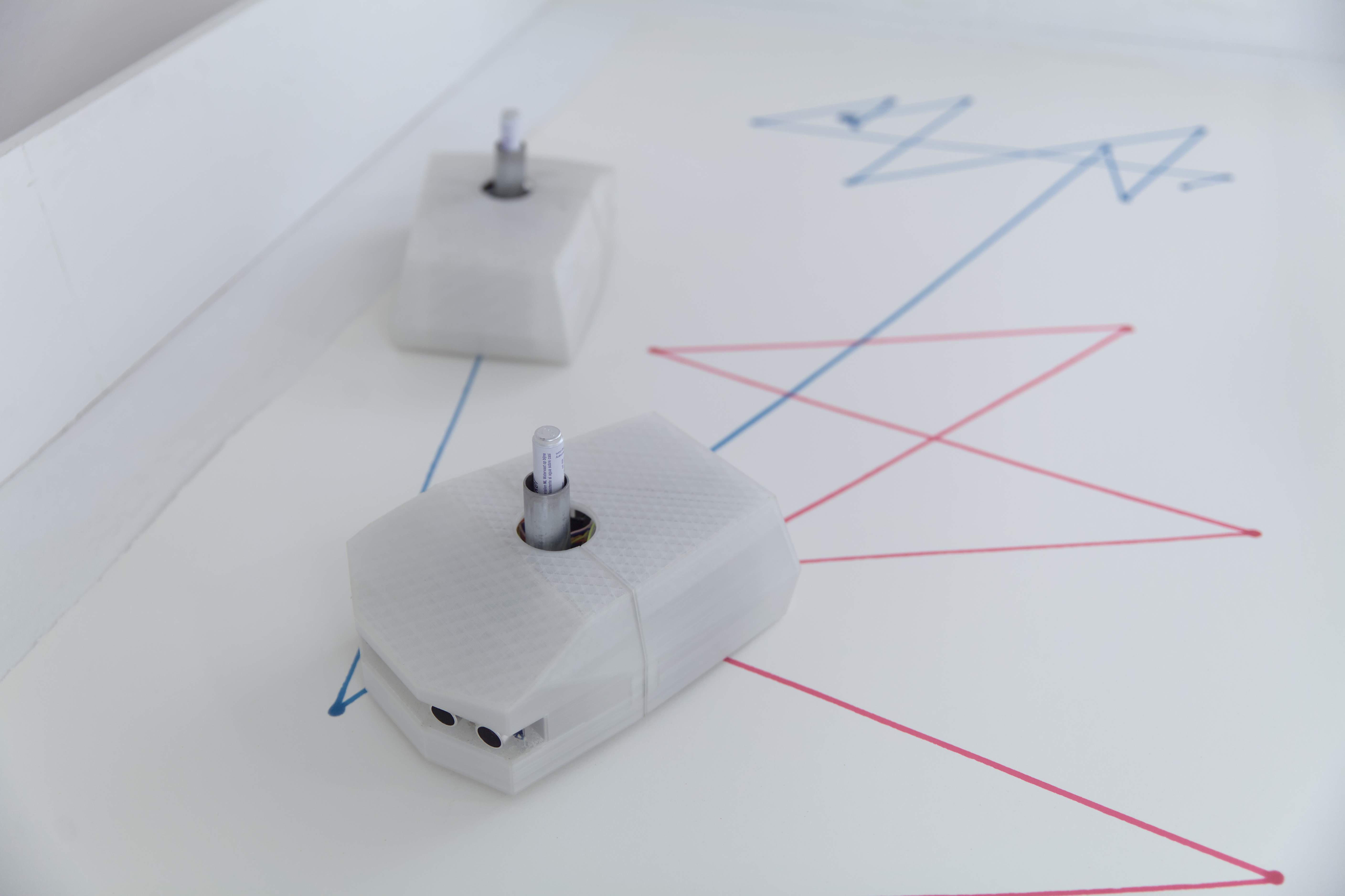
Because a robot's initial placement angle is never identical and the vehicles must constantly avoid one another, the results are entirely unpredictable. Although the underlying code is simple, the influence of chance ensures that they continuously create new, unique compositions every time.The Robots
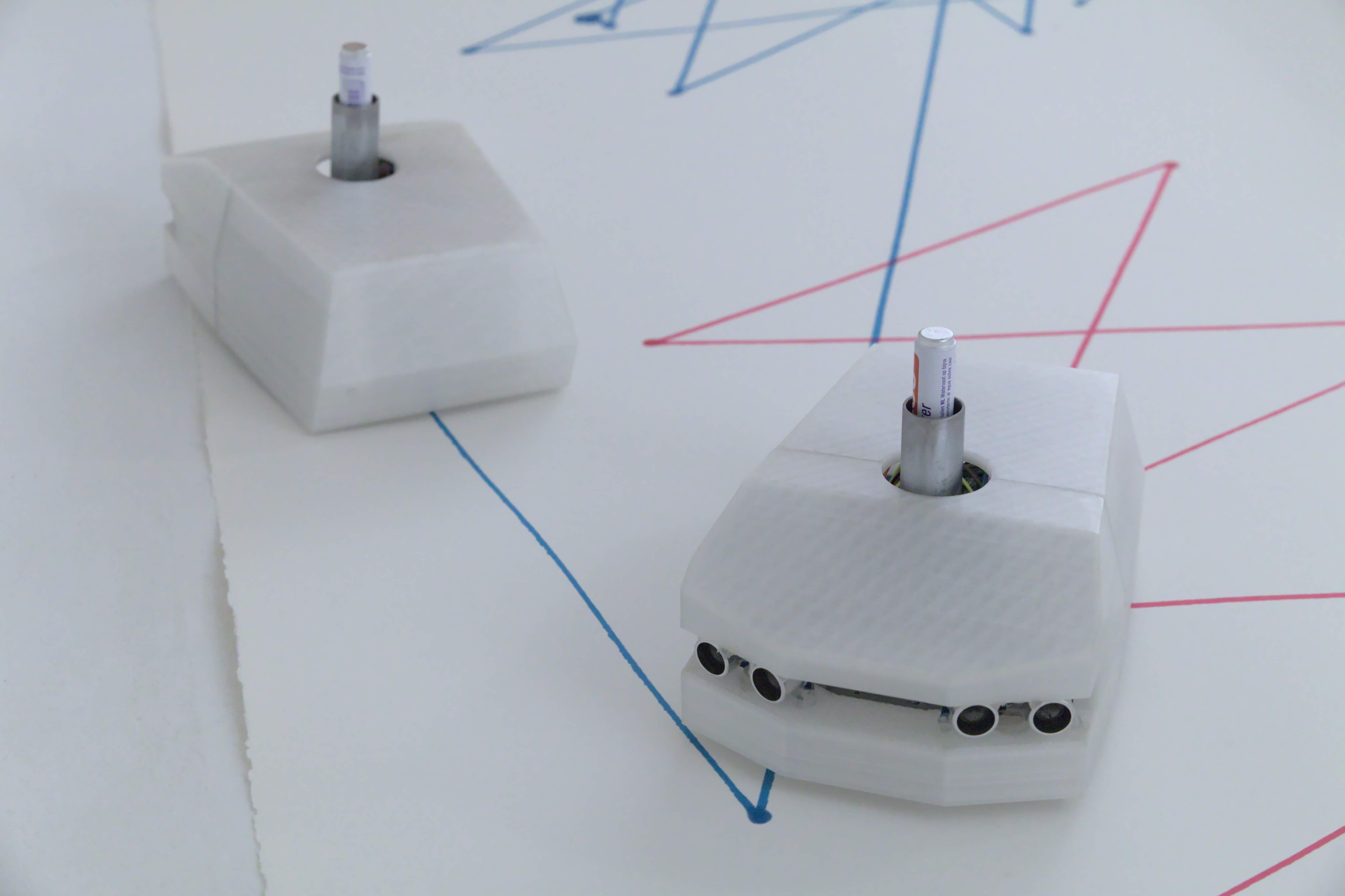
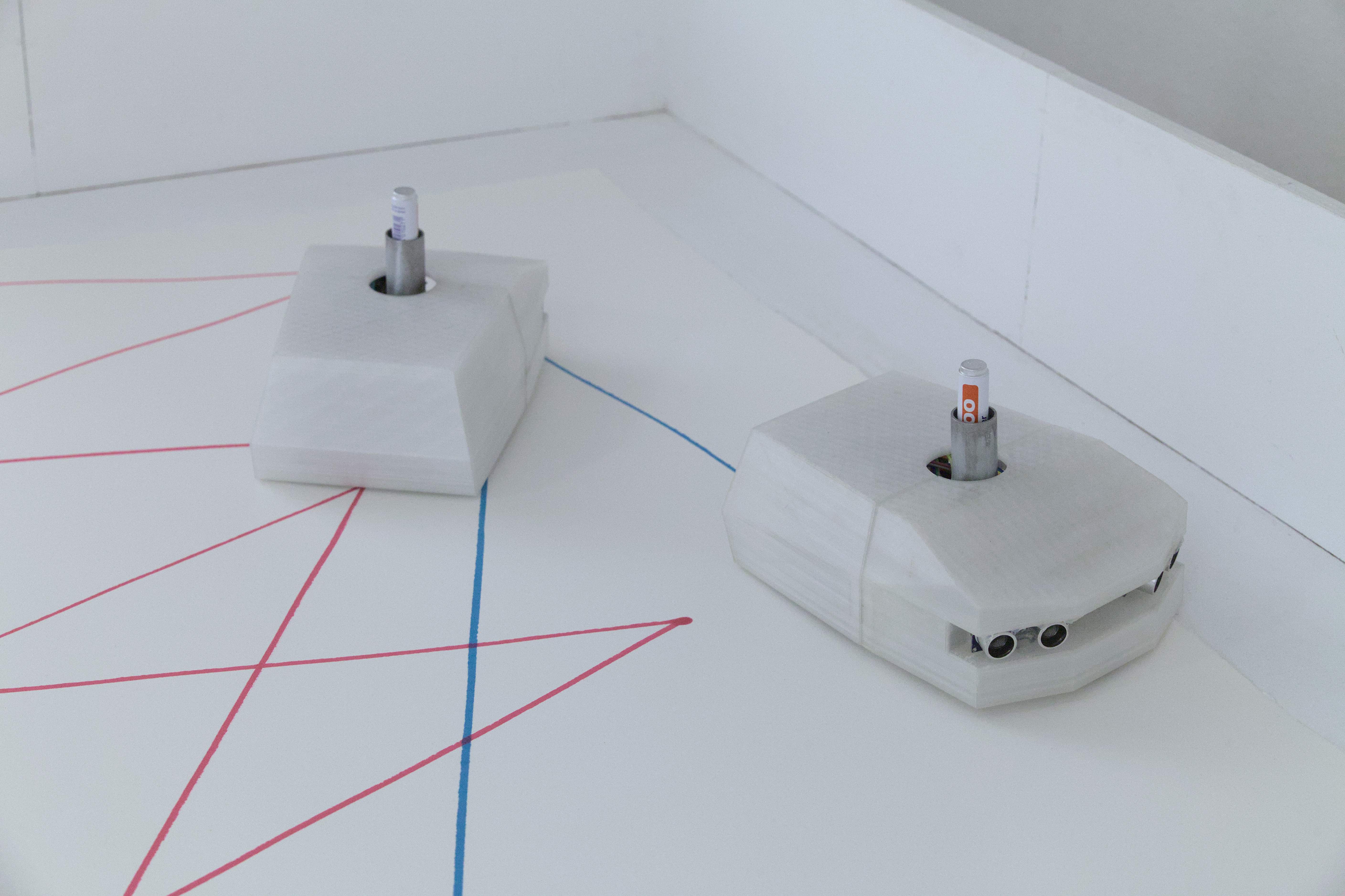
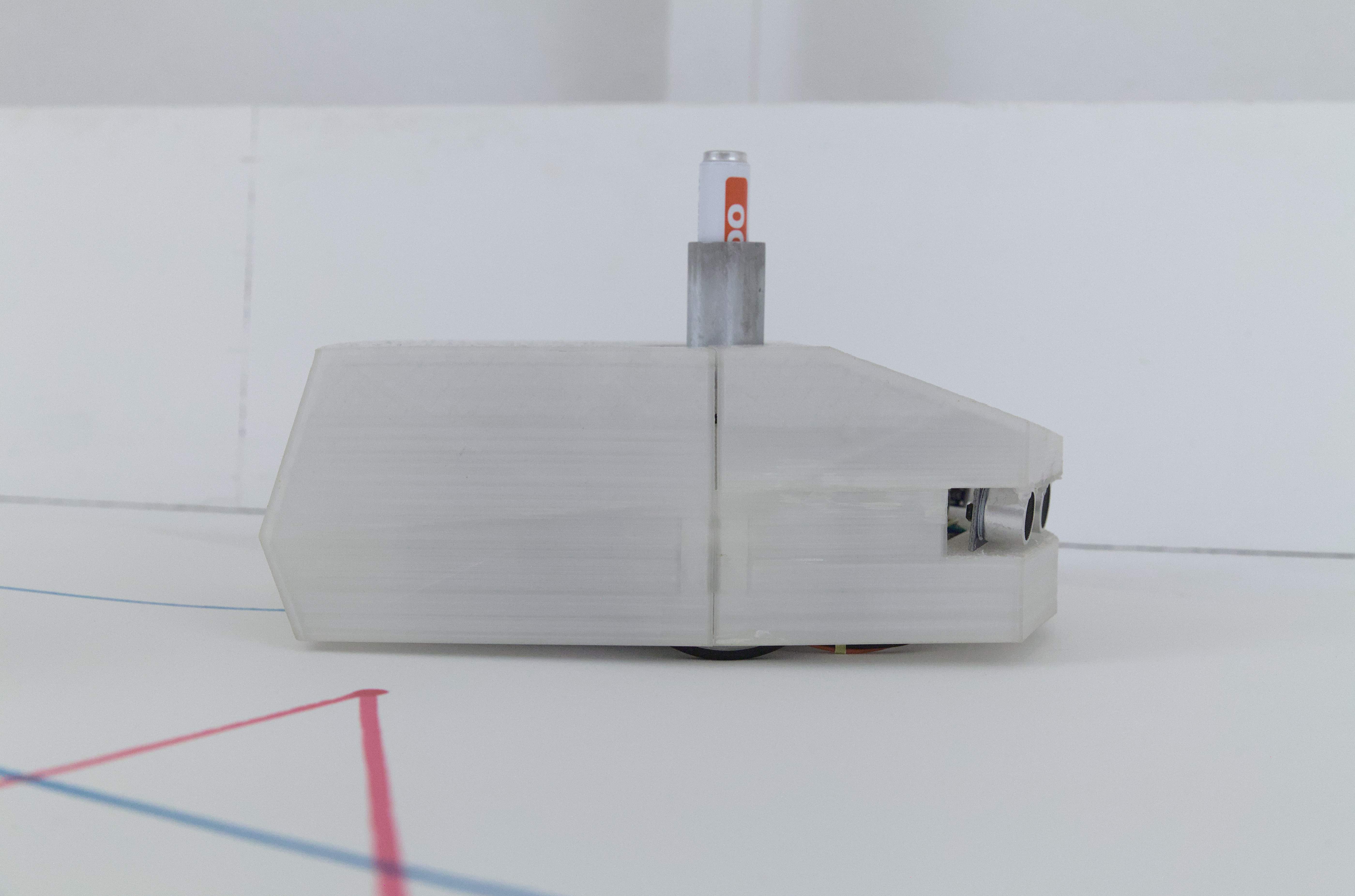
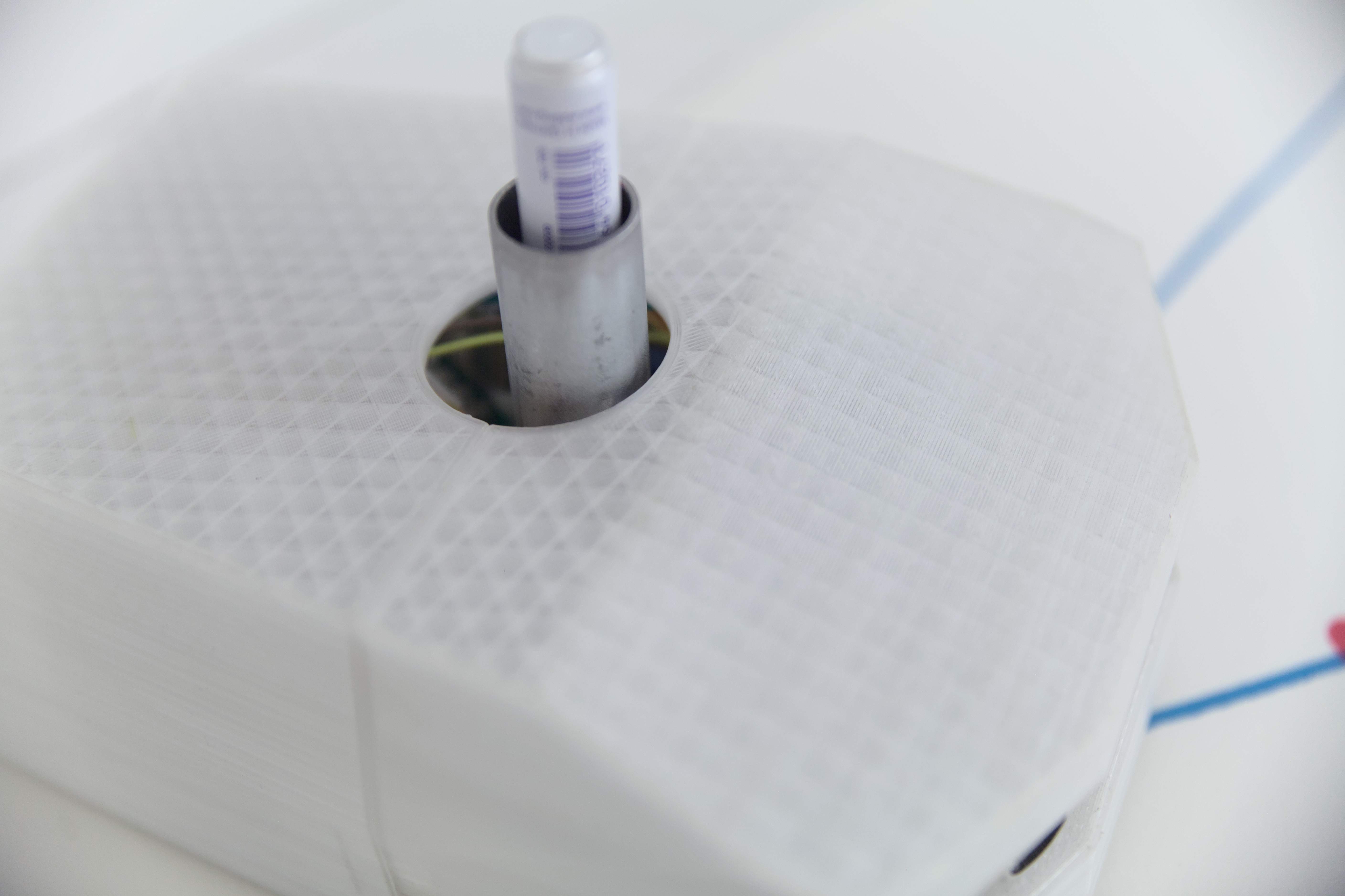
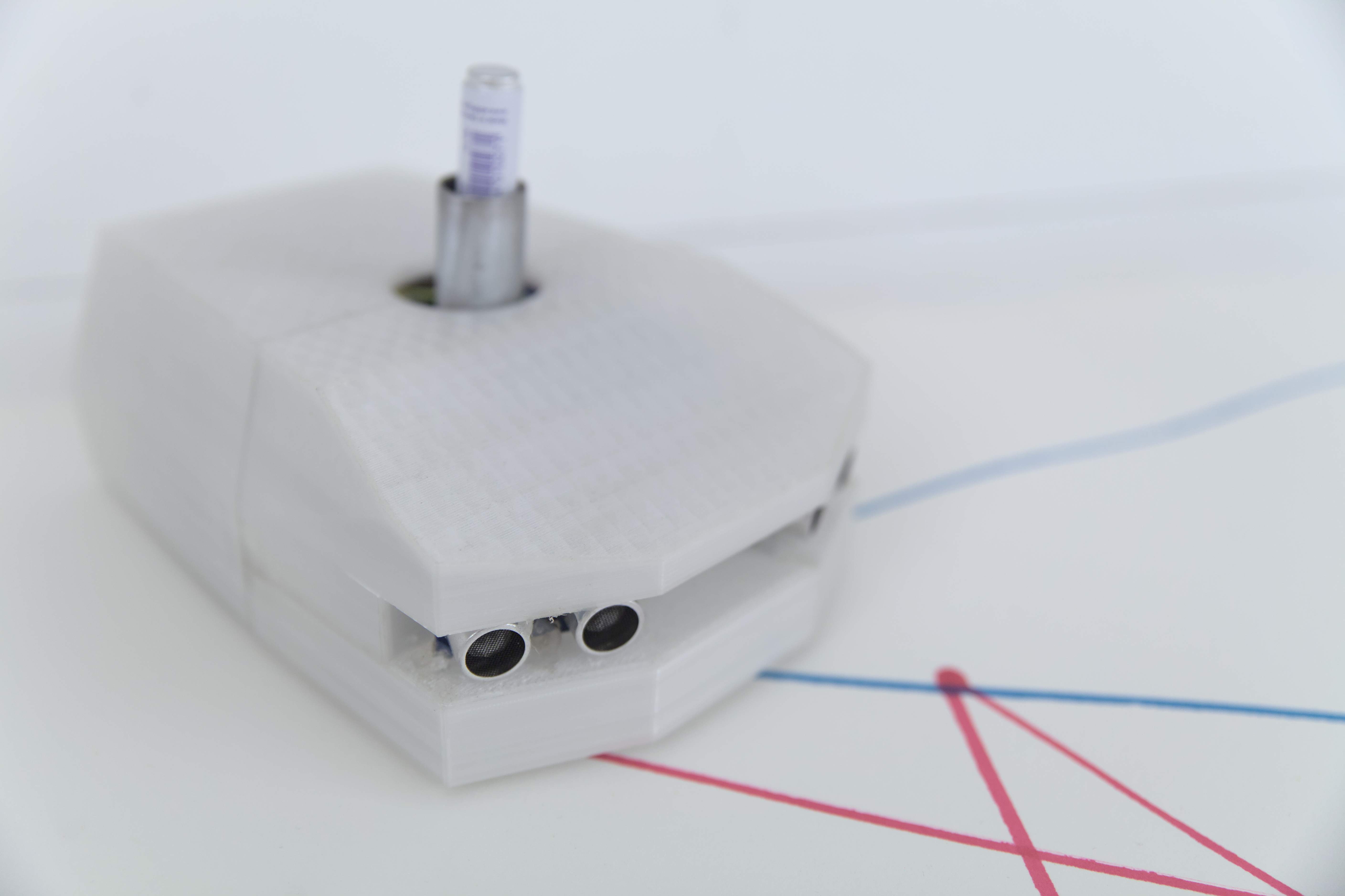
Each battery-operated vehicle (22 x 15 x 15 cm) is equipped with ultrasonic sensors to perceive distances. They operate based on a simple, predefined rule: "Move forward until an obstacle appears, then evade it at a set angle to bypass it as quickly as possible."The robots move across an 80 x 120 cm sheet of paper (approximately DIN A0) placed on a table with 20 cm-high walls, which define the boundaries of their environment. By raising and lowering a felt pen via a servo motor, they translate their movement into drawings.Technical Specifications
Hardware:An Arduino microcontroller, two stepper motors, a servo motor, two ultrasonic sensors, and rechargeable batteries.
Construction:
Mechanical parts designed in FreeCAD and produced via 3D printing.
Software:
Custom firmware written in C.
The robots have been part of several exhibitions, including the this one.